Recently I have been taking some notes on the classic paper by Dijkgraaf and Witten on topological field theories with finite gauge group (part I of that series). As tends to happen, when you read such a paper you get spun off in all kinds of directions, and notice things you really do not understand. In my case, this thing was the importance of torsion in homology. As I mused here, the root of this problem is that physicists use differential forms to define geometric quantities like the action – which are naturally elements in de Rham cohomology, and take values in  . However, when you want to start thinking about the topology of the underlying manifolds, you need to use concepts coming from integer (co-)homology. In the case of Chern-Simons theory, we need to know under what conditions we can extend a vector bundle from a 3-chain to a 4-chain, which is a question rooted in topology, and thus requires integer homology to answer.
. However, when you want to start thinking about the topology of the underlying manifolds, you need to use concepts coming from integer (co-)homology. In the case of Chern-Simons theory, we need to know under what conditions we can extend a vector bundle from a 3-chain to a 4-chain, which is a question rooted in topology, and thus requires integer homology to answer.
I first learned homology from Hatcher (like so many of us…). I read all of the sections of homology, then read “cohomology is the dual of homology”, stopped reading and started learning about de Rham cohomology. I did this because I am a dummy (physicist). When you think about the “important lessons” from homology, it’s easy to answer something like “homology tells you the cellular decomposition of a space”, because that concept easily maps into de Rham cohomology via Poincare duality. Of course, that’s only because you’ve forgotten about torsion!
Generally, torsion elements of a group are those which have finite order. Homology groups can be written as

where we have  torsion elements of orders
torsion elements of orders  , and
, and  generators of the infinite cyclic parts ( would be the Betti number). When you calculate the homology groups of nice examples like spheres and tori, you might not notice torsion. However, you see it pretty quickly after that (see an earlier post for an example on
generators of the infinite cyclic parts ( would be the Betti number). When you calculate the homology groups of nice examples like spheres and tori, you might not notice torsion. However, you see it pretty quickly after that (see an earlier post for an example on  ). So who cares about torsion? How can we detect torsion and how can it affect something like the action in a physical theory?
). So who cares about torsion? How can we detect torsion and how can it affect something like the action in a physical theory?
I found a nice answer after reading a paper from Daniel S. Freed, Determinants, Torsion, and Strings (1986). Besides having a very nice explanation of what I am talking about, he has a rather amusing attitude about fact that he has to to be the one to tell physicists about torsion: “The author faces here the unenviable task of explaining these ideas, which perhaps are not completely standard in mathematics, to an audience partly composed of (brave) physicists…” I will elaborate on his short discussion here, and fill in a few gaps here and there since I have room to do so. His audience was (brave) physicists – mine will be myself approximately 2 weeks ago. At that time I knew things about de Rham cohomology and singular homology, but all I knew about torsion was that somehow got in the way of Poincare duality…
Given an abelian group  , we have a subgroup
, we have a subgroup  of the torsion elements (notice the abelian assumption is crucial here. For instance, torsion elements of
of the torsion elements (notice the abelian assumption is crucial here. For instance, torsion elements of  in the free product
in the free product  do not have finite order. Thanks to F. Cohen for pointing this out to me) . There is an exact sequence
do not have finite order. Thanks to F. Cohen for pointing this out to me) . There is an exact sequence

where  is the inclusion (an exact sequence means the image of each map is the kernel of the next).
is the inclusion (an exact sequence means the image of each map is the kernel of the next).  is the “free part of G”, and since
is the “free part of G”, and since  we can explicitly define
we can explicitly define  as
as
By the first isomorphism theorem, we know that the last group is:  . Now we specialize the discussion to
. Now we specialize the discussion to  for smooth manifold
for smooth manifold  (Freed calls a “reasonable space” – but we are physicists so all reasonable spaces are smooth…). Also notice that if I leave coefficients out of
(Freed calls a “reasonable space” – but we are physicists so all reasonable spaces are smooth…). Also notice that if I leave coefficients out of  , I am implying integers.
, I am implying integers.
So in physics, integrals of these classes are actions – so let’s evaluate the integral of the free part of a cohomology class  (the isomorphism is the definition of the cohomology classes as dual to the homology classes). This cohomology class is represented by a closed 1-form
(the isomorphism is the definition of the cohomology classes as dual to the homology classes). This cohomology class is represented by a closed 1-form  (which is also an element in the de Rham complex). Now the usual set up for computing the integral of a form on a manifold follows: a fundamental class on is a pair
(which is also an element in the de Rham complex). Now the usual set up for computing the integral of a form on a manifold follows: a fundamental class on is a pair  where
where  is a simplex in
is a simplex in  and
and  smooth. The fundamental class can be represented by a homology class
smooth. The fundamental class can be represented by a homology class ![[M]\in H_k(M)](https://s0.wp.com/latex.php?latex=%5BM%5D%5Cin+H_k%28M%29&bg=ffffff&fg=444444&s=0&c=20201002) and we have the pairing
and we have the pairing
![\langle c,[M]\rangle = \int_M f^*(\gamma)](https://s0.wp.com/latex.php?latex=%5Clangle+c%2C%5BM%5D%5Crangle+%3D+%5Cint_M+f%5E%2A%28%5Cgamma%29&bg=ffffff&fg=444444&s=0&c=20201002)
(If you are not familiar with this pairing, you can take it as a definition). The brackets give us a map , which is an integer since the form
, which is an integer since the form  is the representation of an integer class.
is the representation of an integer class.
Now consider what happens if we integrate over a torsion element. We need the following result from the Universal Coefficient Theorem (which deserves it’s own post here at some point)

So we start with a torsion class ![[p]\in H_{k-1}(M)](https://s0.wp.com/latex.php?latex=%5Bp%5D%5Cin+H_%7Bk-1%7D%28M%29&bg=ffffff&fg=444444&s=0&c=20201002) . Writing the groups additively (and assuming that our brains can think outside of the group structure and multiply elements…) we have
. Writing the groups additively (and assuming that our brains can think outside of the group structure and multiply elements…) we have ![k[p]=0](https://s0.wp.com/latex.php?latex=k%5Bp%5D%3D0&bg=ffffff&fg=444444&s=0&c=20201002) for
for  . Now pick a chain
. Now pick a chain  such that
such that  , where I write
, where I write  (the chain, not the class). Now
(the chain, not the class). Now  is an integer chain so
is an integer chain so  is an integer chain too. However, this does not mean
is an integer chain too. However, this does not mean  is necessarily integer any more – has coefficients in
is necessarily integer any more – has coefficients in  (rational numbers, specifically those of the form
(rational numbers, specifically those of the form  for
for  ). Now denote the chain
). Now denote the chain  as the form with the “coefficients reduced”.
as the form with the “coefficients reduced”.
(This means that for every coefficient  of , we “subtract off all the integer parts”. If
of , we “subtract off all the integer parts”. If  then
then  and we are done. If
and we are done. If  , write
, write  and:
and:
 .
.
Now replace the coefficient with  . No one is going to read this garbage, right…?)
. No one is going to read this garbage, right…?)
In any case, this means is closed – we have basically replaced  with
with  , and “there is no way” (go away mathematicians) that the rational numbers in will add up to be an integer. Thus,
, and “there is no way” (go away mathematicians) that the rational numbers in will add up to be an integer. Thus,  must vanish, and
must vanish, and
![[\bar{q}]\in H_k(M;\mathbb{Z}/k)](https://s0.wp.com/latex.php?latex=%5B%5Cbar%7Bq%7D%5D%5Cin+H_k%28M%3B%5Cmathbb%7BZ%7D%2Fk%29&bg=ffffff&fg=444444&s=0&c=20201002) .
.
Now since this is an element of  -homology, we can evaluate it on the -class c from above to get
-homology, we can evaluate it on the -class c from above to get
![\langle c,[\bar{q}]\rangle \in \mathbb{Z}/k](https://s0.wp.com/latex.php?latex=%5Clangle+c%2C%5B%5Cbar%7Bq%7D%5D%5Crangle+%5Cin+%5Cmathbb%7BZ%7D%2Fk&bg=ffffff&fg=444444&s=0&c=20201002)
So the point is that integration on integer cohomology classes breaks into  on the free part and on the torsion part. These are related to topological structures and invariants, which is why they are important in topological quantum field theories, like what I am interested in right now. The major lesson here is that since the integration on forms detects the difference between torsion and non-torsion elements, they actually hold some importance for physics. However, at this level it appears that this is true only when the forms are restricted to be integral.
on the free part and on the torsion part. These are related to topological structures and invariants, which is why they are important in topological quantum field theories, like what I am interested in right now. The major lesson here is that since the integration on forms detects the difference between torsion and non-torsion elements, they actually hold some importance for physics. However, at this level it appears that this is true only when the forms are restricted to be integral.

 such that for every
such that for every  there is a neighborhood
there is a neighborhood  of
of  such
such
 is an open set in
is an open set in  ,
,  is called the branch locus, and over the branch locus some of the sheets “collide”, so that there are now
is called the branch locus, and over the branch locus some of the sheets “collide”, so that there are now  inverse images of the covering map. An illustration may be more helpful:
inverse images of the covering map. An illustration may be more helpful: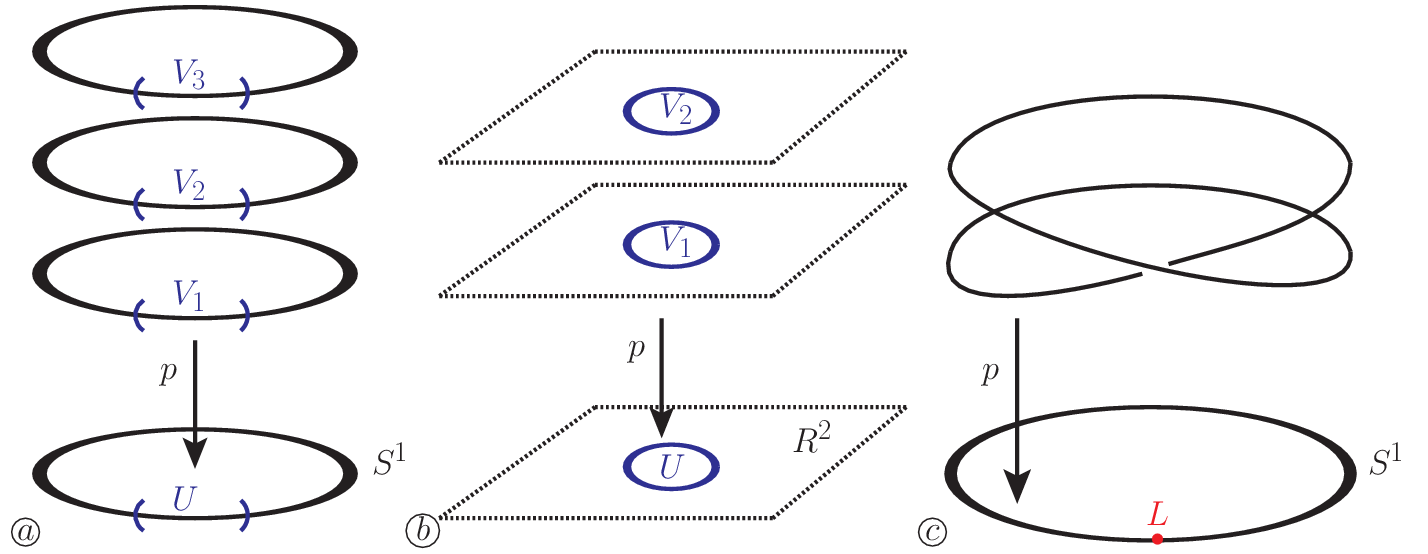
 . The picture makes it seem like the covers are “crossing” each other, but it’s more accurate to say they are “glued together” in some specific manner. In fact, every singular point is described locally via coordinates
. The picture makes it seem like the covers are “crossing” each other, but it’s more accurate to say they are “glued together” in some specific manner. In fact, every singular point is described locally via coordinates  for an
for an  ) can be represented as a covering space of the n-sphere branched over an
) can be represented as a covering space of the n-sphere branched over an  -complex.
-complex.